从 24 年 11 月写完初稿,经过 11 个月的 24 稿的修订,最终在国庆期间完成 T-RO 投稿。
人生第一次写稿、投稿,很多地方不熟悉,遂记录流程。
1. Finish Manuscript
1.1 Download Template
- download url: https://template-selector.ieee.org/secure/templateSelector/publicationType;
- 选择 Trans 下载 Word or Latex,建议用 Latex;
- 中文转英文填写即可,根据 Latex Template 填写对应内容;
- 用 VSCode 来编译,查看;
1.2 Notices for Latex
- Regular Paper 建议6-12页(双栏),含图表和参考文献;
- 摘要最多 200 字;
- 基金和作者信息放在首页左下角;
- 参考文献格式:按文中出现顺序编号,文中以方括号引用(如 [1]),具体查看 this;
- 期刊名称和会议要用斜体;
- 期刊名称前不用 in,会议前用 in;
- 参考文献中作者人数少于等于六个需要给出全部作者姓名,多于七个要 et al;
- 引号改成“新罗马体Times New Roman”下的引号格式,如
“”,而不是"",tex 为``''; - 期刊有 vol. no. pp.,会议有 pp.;
2. Submission Procedures
完整的提交流程查看 T-RO PaperCept Submission Procedures。
2.1 log in
PIN:所有的 co-authors 都需要注册一个PIN;- 完善个人信息;
ORCID:第一作者和通讯作者需要将PIN与ORCID进行绑定,在后续会用到;
2.2 submit a new paper
2.3 Select the Type of Submission
2.4 Choose to Whom to Submit
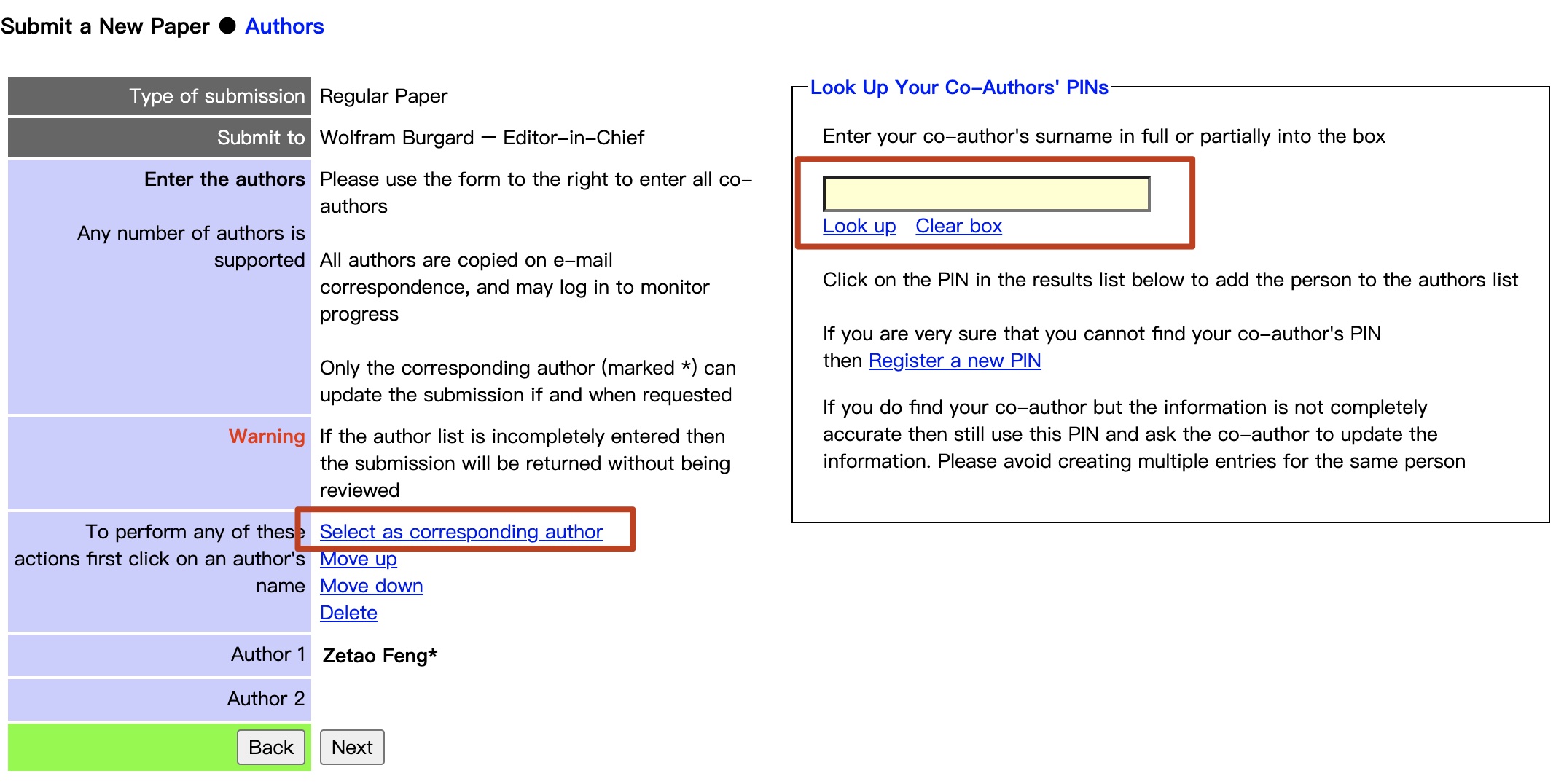
2.5 Authors
- 查找所有作者的
PIN,只能通过姓查找,比如我姓冯,就搜索 Feng,然后找到对应的PIN; - 如果没有,注册即可;
- 设置通讯作者,该通讯作者的
PIN必须和ORCID,不然无法下一步;
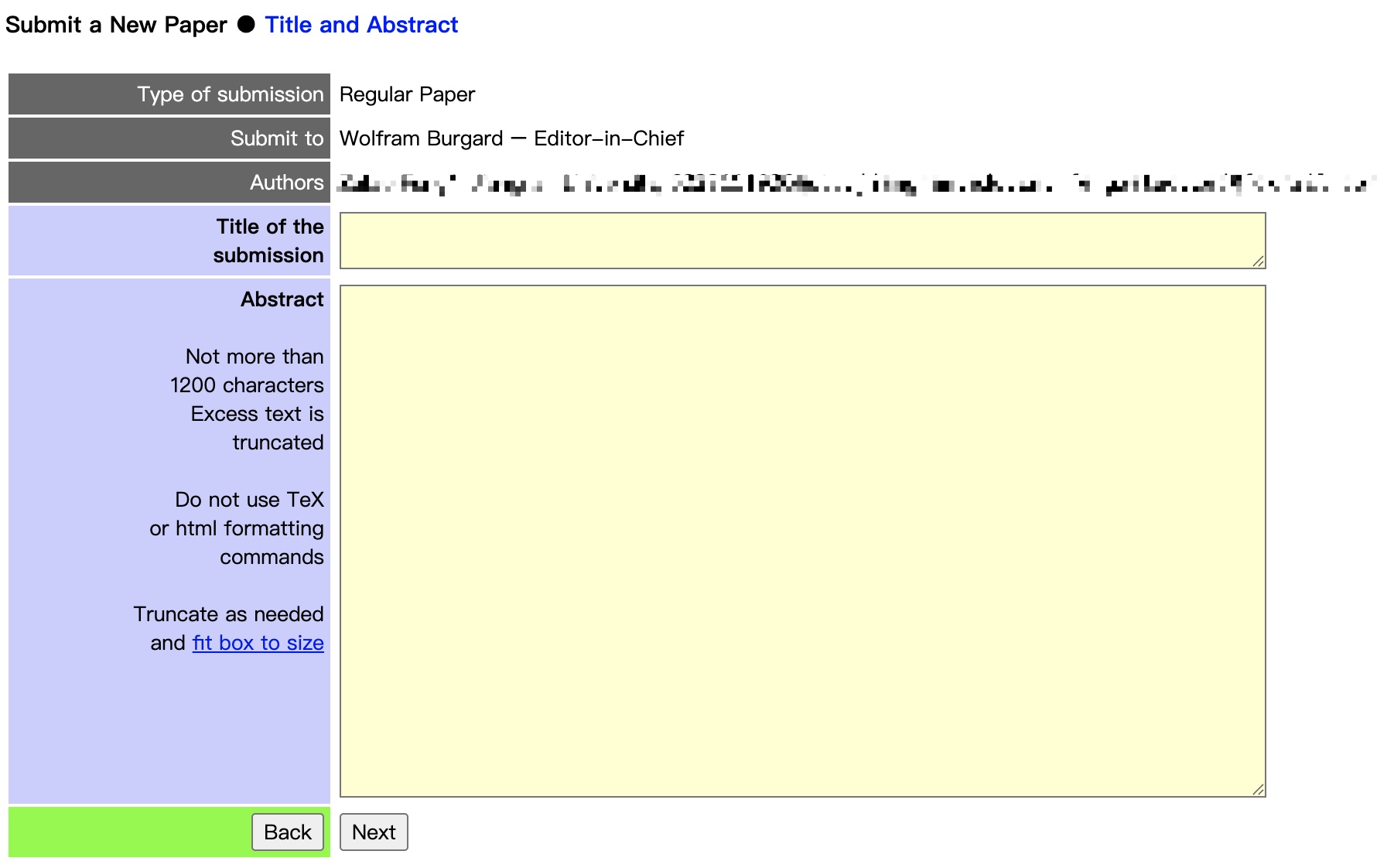
2.6 Title and Abstract
- 系统里的摘要,不能超过 1200 字符!!!
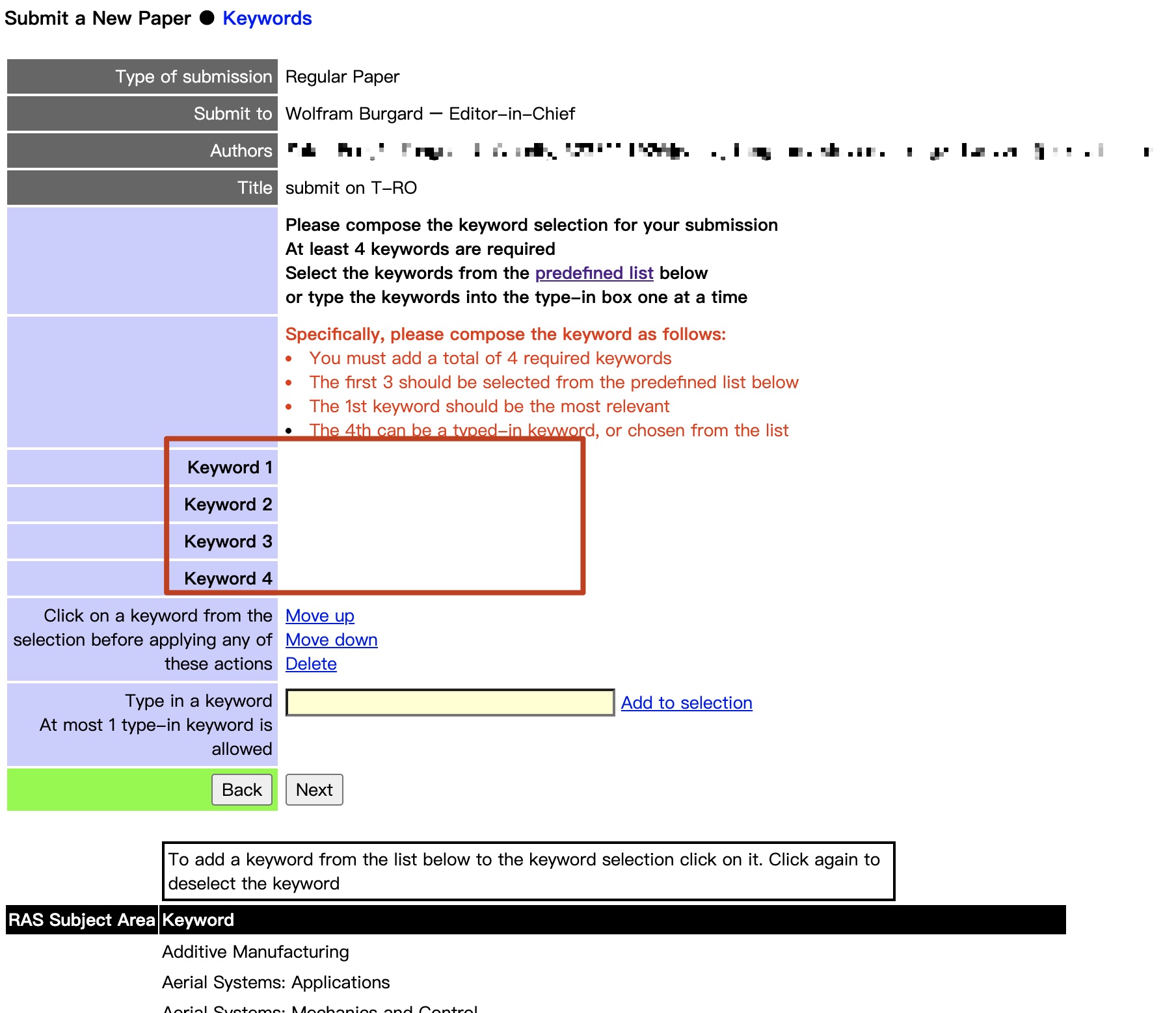
2.7 Keywords
- 三个必须是和 RAS Subject Area 关联的,比如
SLAM,Dynamics,剩下一个可以自己填;
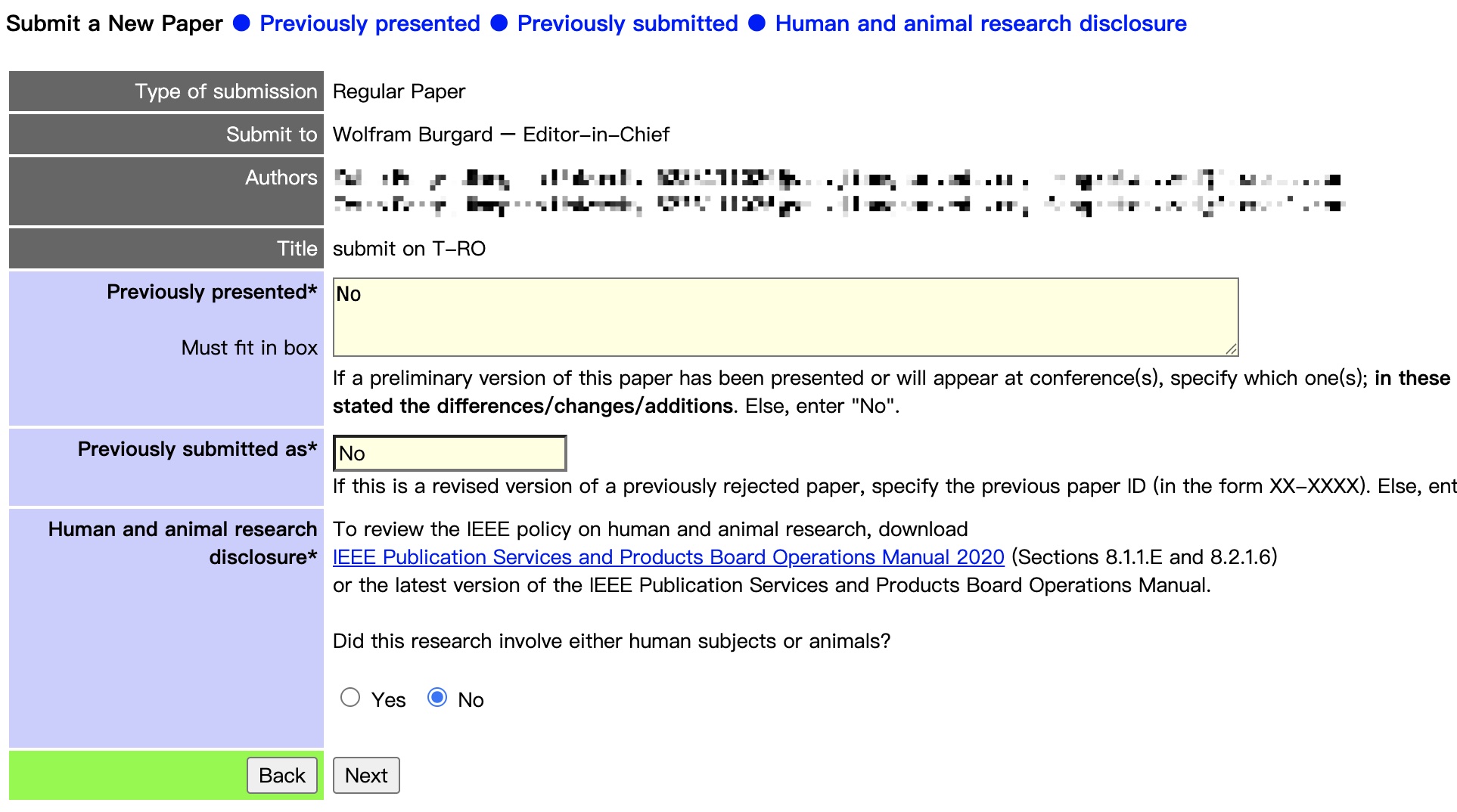
2.8 Notices
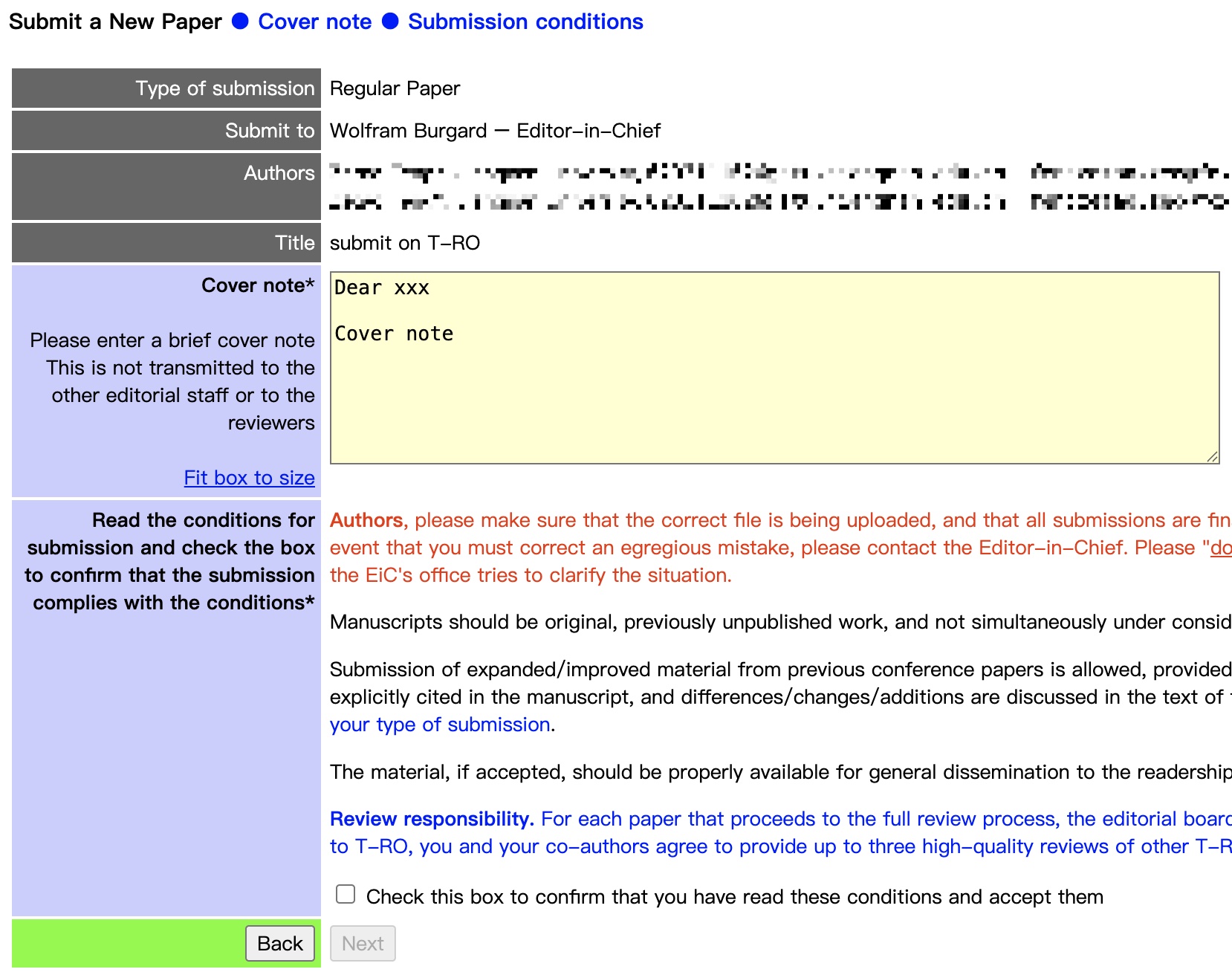
2.9 Cover note
- 填写 cover note,对主编说的话,指出创新点,模板可以从 Reference 中查看;
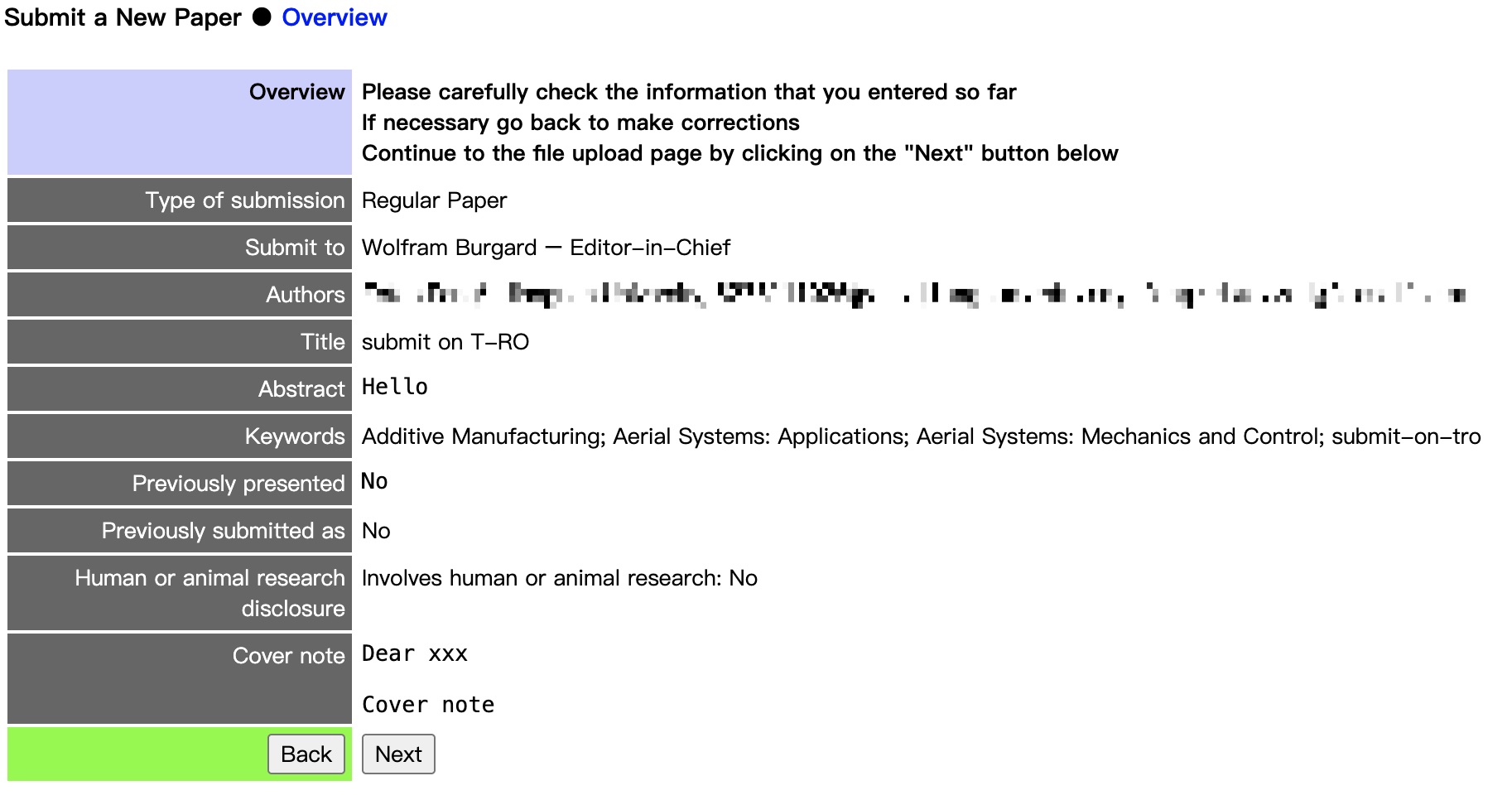
2.10 Overview
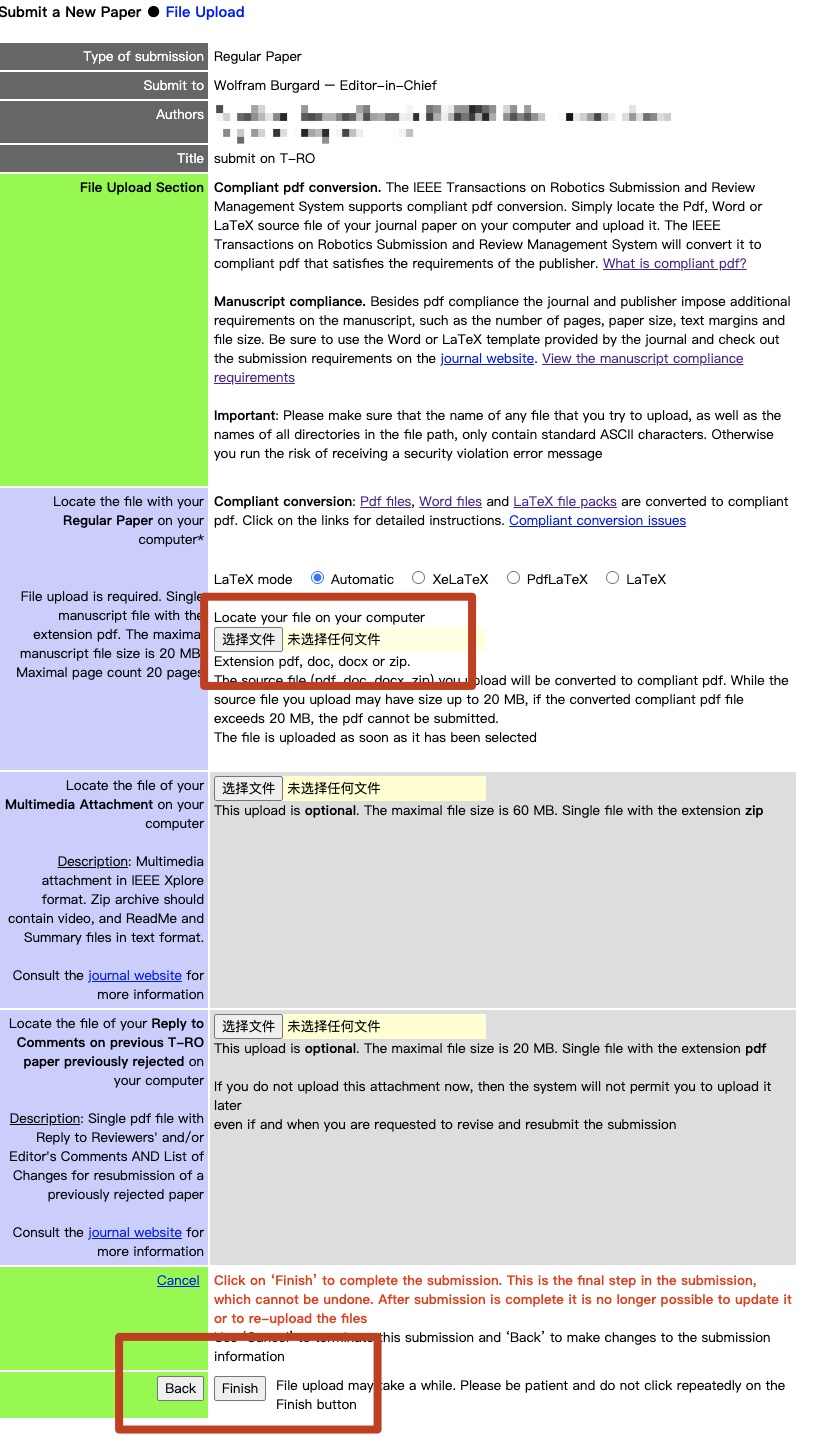
2.11 File Upload
- 上传 Manuscript PDF;
- Finish!
Reference
- Log In IEEE T-RO
- IEEE Transactions on Robotics (T-RO)
- T-RO PaperCept Submission Procedures
- IEEE-Template Selector
- IEEE Transactions on Robotics期刊介绍及投稿模板
- IEEE Transactions on Robotics,投稿过程交流
- IEEE EDITORIAL STYLE MANUAL FOR AUTHORS
- 使用Latex排版一篇IEEE Robotics and Automation Letters期刊文章
- IEEE Transaction期刊模板使用注意事项
- 关于IEEE Transactions论文的参考文献格式
- IEEE RAL投初稿
- 论文投稿之投稿信(Cover Letter)写法–附真实案例
本文作者:jujimeizuo
本文地址: https://blog.jujimeizuo.cn/2025/10/08/submit-on-T-RO/
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0 协议。转载请注明出处!